Kinematički par: koncept, klasifikacija. Kuglasti zglob, šarna petlja
Svaki kompleksni mehanizam inženjerstva sastoji se od skupa jednostavnih elemenata. Da biste razumjeli kako funkcionira sustav u cjelini, potrebno je rastaviti rad svakog čvora. A to je prije svega razumijevanje kinematičkog para.
sadržaj

Osnovni pojmovi
Ako uzmemo dva objekta (veze) koji se dodiruju, a time i ova veza je pokretna, onda imamo kinematički par (CP) ispred nas. Njegova osobitost je određeno ograničenje u kretanju veza.
Kruto tijelo može imati ograničenu sposobnost da se pomakne, a onda postoji takva stvar kao stanje komunikacije. Broji se do pet komunikacijskih uvjeta, s obzirom na interakciju veza u paru. Stoga podjela u klase. Zaključili su ih pet za kinematičke parove, svaki od njih ima svoj stupanj mobilnosti. U razredu je šest stupnjeva mobilnosti. Sve moderne mehanike temelje se na primjeni posljednjih tri klase kinematičkih parova.
Svako tijelo (veza) ima svoju geometriju. Dakle, elementi koji odgovaraju ovom obrascu također su u kontaktu. Ispada da će KP moći izvesti samo takav pokret koji neće biti u suprotnosti s geometrijom veza. Osim toga, kako bi bilo koji kretanje u odnosu na svaki drugi, jedna veza mora biti trajno fiksirana, a drugi u paru je pogođen.
Svaka točka u vezi u trenutku kretanja prolazi put (putanja). Ova putanja može imati oblik krivulje koja se nalazi na ravnini. Kada su ravnine položaja krivulja puta veza u paru međusobno paralelne, to je ravni par. Ako su krivulje gibanja točaka veza smještene u trodimenzionalnom prostoru, kinematički par je prostorni.

vrste
Postoje sljedeće vrste mehanizama.
Rotirajući par je jedan mobilni sustav. Veze koje čine takav par su sposobne obavljati samo karakterističnu rotaciju oko štapa ili osi. U tom slučaju, kontakt elemenata izvodi se na površini cilindričnog oblika. Takav je geometrijski sustav zatvoren i pripada nižim. Analogni mehanizam u području viših parova je kuglični ležaj.
Par progresivne interakcije isti kao i prethodni, u smislu mobilnosti jedne stanice. U takvom sustavu, veze mogu izvoditi samo translational pokret u pravocrtnom smjeru. Mehanizam je najniži par, zatvoren u geometrijskim parametrima.
Par vrste međudjelujućih cilindara. Ovaj sustav već je u pokretu, njegova je geometrija zatvorena. To je inferioran - veze se mogu okretati i kretati u smjeru naprijed.
Par sferičnog tipa je sustav s tri klizača. Sloboda takvog para ima stupanj koji dopušta da se veze okreću u trodimenzionalnom prostoru, opisujući koordinate osi. Također je najniži geometrijski zatvoreni mehanizam.
Par sferičnog tipa s prstom - Dva pokreta. Kretanje (relativno nezavisna rotacija) veza u ovom paru ograničeno je prstom i utorom. Par nižeg reda je geometrijski zatvoren.
Par tipa vijka ima stupanj slobode jednog pokretljivosti. Mehanizam najnižeg reda je geometrijski zatvoreni sustav, u kojem je moguć samo spiralni gibanje s određenim korakom. Pomak u kutnim i linearnim smjerovima strogo je jednoznačan.
Par ravnog tipa, ravni cilindar, zrakoplovna lopta. U tim mehanizmima koristi se zatvaranje sile. U razredu, prva se odnosi na niže, a ostalo prema višim sustavima. U praksi, takvi kinematički parovi veza nisu pronašli primjenu.
klasifikacija
KP ima sljedeću klasifikaciju.
- Po vrsti komunikacije na mjestu kontakta.
Parove najnižeg reda kontaktiraju se vezama duž površina. Pronašli su široku primjenu u mehanici, imaju jednostavniji dizajn od viših parova. Strukturno, njihove veze dodiruju zrakoplove i klize ih po njima. Dakle, opterećenje se ravnomjerno raspoređuje unutar elementa, ali trenje na spojnom mjestu veza se povećava. Pozitivan trenutak parova najnižeg reda je da je moguće prenijeti velika opterećenja od veze do veze.
Viši kinematički parovi imaju kontaktne točke duž krivulje ili na točkama. Njihova glavna svrha je smanjiti stupanj trenja između elemenata veza tijekom kretanja. Klasični primjer viših parova su ležajevi ili valjci. Unutarnji dizajn tih elemenata na kretanje veza povezanih s parom ne utječe. Da bi se pojednostavio mehanizam, metode se koriste za zamjenu viših kinematičkih parova pomoću nižih analoga.
- Po vrsti relativnog kretanja koje povezuju parovi.
- Rotary.
- Progresivni.
- Cilindrični.
- Kuglasti.
- Vrsta vijka.
- Stan.
Ako mehanizam sadrži samo parove koji koriste samo prve četiri vrste gibanja, onda se naziva vrsta poluge.
- Po vrsti komunikacije između veza.
- Sile, na primjer, pritisak opruge, tjelesna težina, komprimirani plin ili tekućina, inercijalne sile.
- Zbog geometrijskog dizajna elemenata para.
- Kroz stupanj pokretljivosti veza tijekom kretanja.
- Po broju uvjeta komunikacije.
Preokretni i nepovratni mehanizmi
Ako je moguće, kretanja veza u sustavu u odnosu na izbor uvjetno fiksirane veze odlikuju se reverzibilnim i nepovratnim CP-ima.
Ako bilo koji element mehanizma u slobodnom stanju relativnog kretanja elementa ponavlja uvjetno stacionarnom stanju, povratna kinematička par smatra (primjer - odnopodvizhnye parova).
Ako u mehanizmu svaki element u slobodnom stanju čini relativno gibanje drugačije od ostalih, tada je takav par nepovratan.

Vrste zupčanika u mehanici
Pod mehaničkim mjenjačem shvatiti mehanički sustav koji pretvara kinematiku motora i energiju u obliku prihvatljivom za korištenje od strane radnih tijela strojeva za rad u unaprijed određenom načinu rada.
Postoje programi:
- Zupčanik. Ova veza temelji se na cilindričnim i konusnim elementima. Prethodni prenose kretanje u jednoj ravnini, potonji pod kutom. Prijenosni prijenosi karakteriziraju kompaktnost i mogućnost prijenosa velikih kapaciteta. Oni su vrlo učinkoviti, ali stvaraju buku tijekom rada i zahtijevaju podmazivanje.
- Vrsta vijka. Osim klasičnog vijka, ova kategorija uključuje hipoidne i crvne zupčanike. Potonji tip mehaničkog prijenosa koristi se kada je potrebno postići veliki omjer prijenosa. Također se razlikuju po bezizražajnosti i glatkoći u radu i sposobnosti samoregulacije. Nedostaci uključuju nisku učinkovitost i visoku trošenje.
- Na fleksibilnim elementima. Ovdje se gibanje i energija prenose u jednoj ravnini zbog različitih pojaseva i lanaca. Transferi pojaseva su jednostavni i mogu pokriti velike udaljenosti.
- Tip frikcije. U odnosima ove prirode koristi se sila trenja. Koriste se u mehanizmima koji rade pod teškim uvjetima.

Vrsta kuglastog zgloba
Glavna svrha kuglastog zgloba je dopustiti da se poprečna spojnica šipke upravljača preko ručice spoji s okretnim pločama kotača. Oblik šarke uključuje vrh - ima peciva, opruge, tlačnu kapu, lopaticu i ulje za ulje. Proljeće pritisne na kuglice kuglastog zgloba, a površina kuglastog oblika drži prst. Ovaj dizajn osigurava da mehanizam funkcionira čak i kada se istroši.

Zglobna petlja
Šarke ili nadstrešnice su mehanizmi izgrađeni na temelju cilindričnog šarke. Oni služe za otvaranje i zatvaranje vrata, prozora, vrata za namještaj. Oblika petlje obuhvaća dvije pravokutne krpe (kartice) u kojima su bušene rupice za pričvršćenje i jezgra. Zglobni šarki izrađeni su uglavnom od čelika i različitih legura.

zaključak
Zanimljivo je da su ljudski zglobovi sve glavne vrste kinematičkih parova opisanih gore. Stoga je očigledna potreba za razumijevanjem procesa koji se odvijaju u mehanici.
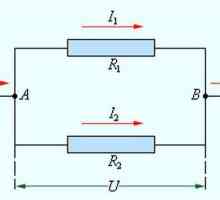 Serijska i paralelna veza
Serijska i paralelna veza Kinematička shema. Kinematografska shema pogona. Kinematske sheme mehanizama
Kinematička shema. Kinematografska shema pogona. Kinematske sheme mehanizama Što je veza s profilom u grupama razreda: kako ga prepoznati i urediti
Što je veza s profilom u grupama razreda: kako ga prepoznati i urediti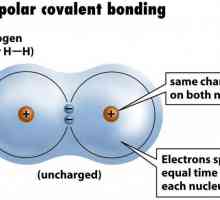 Primjer nepolarne kovalentne veze. Kovalentna veza polarna i nepolarna
Primjer nepolarne kovalentne veze. Kovalentna veza polarna i nepolarna Zglobna veza
Zglobna veza Što je veza? Detaljna analiza
Što je veza? Detaljna analiza Donja-akceptorska veza: primjeri tvari
Donja-akceptorska veza: primjeri tvari Kako odrediti stupanj oksidacije
Kako odrediti stupanj oksidacije- Glavne vrste kemijskih veza: zašto i kako se formiraju
- Kovalentna veza
- Kategorije dijalektike u filozofiji
- Što je kovalentna polarna veza
- Metalno lijepljenje
- Ion vezivanje
- Rotacija i mehanizam za brijanje
- Model podataka mreže
- Struktura baze podataka
- Društveni sustav
 Kovalentna nepolarna veza je kemijska veza koju čine identični atomi
Kovalentna nepolarna veza je kemijska veza koju čine identični atomi Što je ionska veza? Primjeri tvari s njom i njena svojstva
Što je ionska veza? Primjeri tvari s njom i njena svojstva- Struktura društva. Koncept
 Kinematička shema. Kinematografska shema pogona. Kinematske sheme mehanizama
Kinematička shema. Kinematografska shema pogona. Kinematske sheme mehanizama Što je veza s profilom u grupama razreda: kako ga prepoznati i urediti
Što je veza s profilom u grupama razreda: kako ga prepoznati i urediti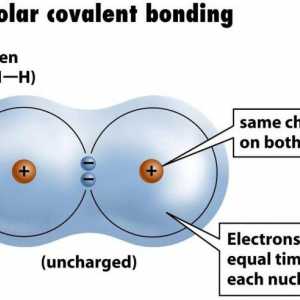 Primjer nepolarne kovalentne veze. Kovalentna veza polarna i nepolarna
Primjer nepolarne kovalentne veze. Kovalentna veza polarna i nepolarna Zglobna veza
Zglobna veza Što je veza? Detaljna analiza
Što je veza? Detaljna analiza Donja-akceptorska veza: primjeri tvari
Donja-akceptorska veza: primjeri tvari